本文最后更新于:4 个月前
在自动控制理论中,最负盛名的莫过于PID控制算法了。原理简单,应用广泛,受到很多的工程师们的喜爱。在稚晖君最新的视频BV1jE41137eu中,他设计的’自行车’XUAN的自行车车头无刷电机的控制算法就是PID控制算法。
前言 在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(PI、PD、…)。
在工业过程中,连续控制系统的理想PID控制规律为:
$$u(t)=K_p(e(t)+\frac{1}{T_t}\int_0^te(t)dt+T_D\frac{de(t)}{dt})$$
式中,Kp——比例增益,Kp与比例度成倒数关系;
反馈调节 在自动控制原理中,引入反馈调节的主要目的就是为了使得系统更加稳定,增加系统的抗干扰能力,减小稳态误差。
为了能够更好地描述整个系统的各个量之间的关系,像神经网络一样,我们将PID系统看做是一个黑盒模型,将当前输入设为rin(t),输出为rout(t),那么系统误差就是err(t)=rin(t)-rout(t)。
像在稚晖君的”自行车”项目中,把自行车的水平偏移量作为输出rout(t),而无刷电机的输出电流设为rin(t),根据算法竟可能的减小err(t)的值就可以了,这其实并不是一个表面上看起来那么简单的过程。我们来模拟一下这个看似简单的车头控制过程。
比例增益调节(P) 要实现车头转动一定的角度,那么我们首先想到的就是将目标角度与输出角度的差值err(t)按照一定的比例系数$K_p$进行直接调节。
缺一张流图,下次再画。
根据上图,我们可以知道系统的传递函数为
$$G(s)=\frac{1}{Ts+1}$$
那么该系统的阶跃响应就是
$$e_{ss}=\lim_{s\to0}s\frac{\frac{1}{s}}{1+KG(s)}=\lim_{s\to0}\frac{1}{1+\frac{K}{Ts+1}}=\frac{1}{1+K}$$
由上式可知误差值并不会随着$K_p$的取值而变成0,始终会存在一个小的误差,没有办法达到理想的角度。理论上只有当K足够大时,才能够接近0。当然,如果$K_p$的值过大,导致车头的摆动幅度太大的话,会引入一个惯性的动作,使得车头的位置偏移过大,超过我们所需要的目标角度,这个时候就需要一个反向的输出来掰回车头,如此往复,最终我们看到的结果就是车头在需要的目标角度附近来回摆动。
积分控制(I) $$G(s)=\frac{G_0(s)}{s^k}$$
通过观察上式可知,如果我们要得到一个稳定的0误差的输出,只需要引入一个$\frac{1}{s^k}$的积分器,就可以使得系统消除自身产生的稳态误差。
微分控制(D) 前面我们说到,当我们的$K_p$过大的时候,就会出现摆动幅度过大,使得系统产生自激振荡,为了消除这种现象,我们就需要判断,现在的转动角度的速度是否过快,或者说,角度对于时间t的差分值是不是太大了,如果我们输出渐渐接近输入,误差会不断减小,为一个正数,误差的导数为负数 。转动角度任然以$K_p$比例在接近目标角度,但是此时的微分控制器会产生一个相反的输出来抑制$K_p$的作用,相当于一种“制动”作用,防止输出变化过快而超过目标值,即防止超调量过大。如果输出超过了参考信号,那么误差就会变号,比例控制的组成部分是负数,控制量反向以再次接近目标,此时误差的导数变为正数,微分控制使得控制量能够在绝对值上得到削减。
代码实现 虽然从PID为什么能够稳定的控制目标的输出上看起来长篇大论,但是,只要用代码实现前面那个PID的公式就可以了。
位置式PID算法来自CSDN
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 import timeclass PID :def __init__ (self, P=0.2 , I=0.0 , D=0.0 ):0.00 def clear (self ):0.0 0.0 0.0 0.0 0.0 0.0 20.0 0.0 def update (self, feedback_value ):if (delta_time >= self.sample_time):if (self.ITerm < -self.windup_guard):elif (self.ITerm > self.windup_guard):0.0 if delta_time > 0 :def setKp (self, proportional_gain ):def setKi (self, integral_gain ):def setKd (self, derivative_gain ):def setWindup (self, windup ):def setSampleTime (self, sample_time ):
测试代码
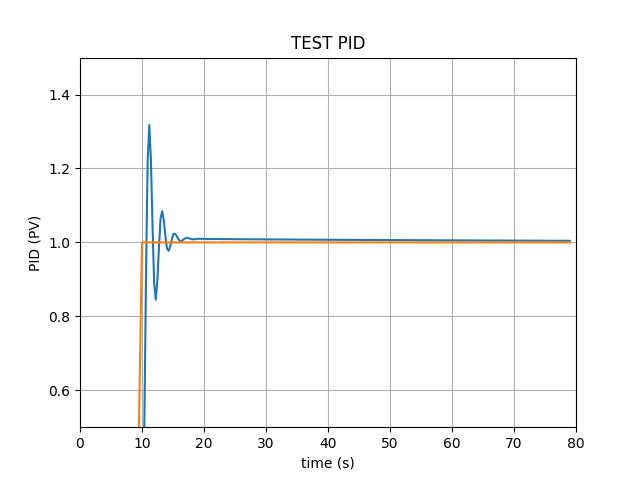
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 import PIDimport timeimport matplotlib"TkAgg" )import matplotlib.pyplot as pltimport numpy as npfrom scipy.interpolate import make_interp_splinedef test_pid (P = 0.2 , I = 0.0 , D= 0.0 , L=100 ):0.0 0.01 )0 for i in range (1 , END):if pid.SetPoint > 0 :if i>9 :1 0.01 )min (), time_sm.max (), 300 )0 )0 , L))min (feedback_list)-0.5 , max (feedback_list)+0.5 ))'time (s)' )'PID (PV)' )'TEST PID' )1 -0.5 , 1 +0.5 ))True )if __name__ == "__main__" :1.2 , 1 , 0.001 , L=80 )
输出结果:
总结 上面的PID运行原理我理解的或者描述可能不太准确,但是公式和代码是没问题的。如果想要更详细的视频解析,可以在哔哩哔哩搜一下PID控制。
这上面的一大段只是稚晖君的自行车算法中的一小部分,太强了,菜鸡默默地滚去学习。